반응형
요즘 ROS공부 개발 매진이다.
로컬에서 실행하지 않고 도커로 공부중이다.
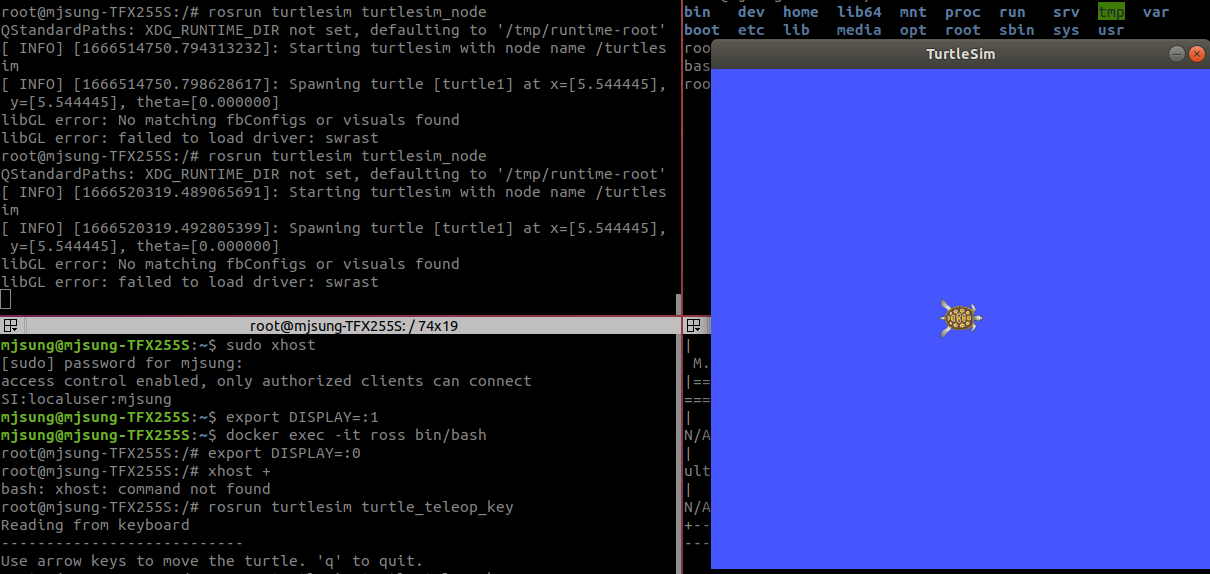
ROS 터틀심 노드를 실행하려고 했는데 해당오류가 발생했다.
환경은 Ubuntu 18.05 LTS 환경이다.
도커를 스타트하고, 접속하고 Roscore를 실행하였는데,

터틀심 노드를 실행할 수 없는 문제였다.

도커 실행 전, 해당 구문을 로컬에서 실행해줬다.
sudo xhost +
export DISPLAY=:1
그리고 컨테이너 접속 후, 해당 구문을 실행해 줬다.
apt install libcanberra-gtk-module libcanberra-gtk3-module
export NO_AT_BRIDGE=1
도커를 스탑하고 다시 실행해주고 접속해 보았다.
터틀심 노드를 켰더니 정상작동이 되었다.
참고
'관련 이것저것 > docker' 카테고리의 다른 글
| [Docker] docker service와 fastapi를 활용한 YOLOv5 inference 서버 구축하기(1) (0) | 2023.08.19 |
|---|---|
| [Docker] docker swarm gpu할당 (0) | 2023.07.23 |
| [Docker] yolov8 docker 설치해보기 (1) | 2023.01.23 |
| [Docker] Illegal instruction(core dumped) error 해결 (Jetson Xavier Nx) (0) | 2022.11.22 |